Projects
Overview
Research Interests
I am passionate about various aspects of Computer Vision and Robotics, including:
- 2D/3D Object Detection & Tracking
- Panoptic & Semantic Segmentation
- Point Cloud Reconstruction
Production Projects
![[ADAS] 3D Object Detection](../images/project/FocalFormer3D_crop.gif)
[ADAS] 3D Object Detection
Key Features:
• End-to-end LiDAR-based detector
• Real-time visualization with predicted bounding boxes
• Multi-threaded pipeline for data loading, inference, and display
[ADAS] 3D Object Detection & Tracking
Key Features:
• Fusion of LiDAR and camera data
• High-performance detection on edge devices
• Real-time SORT tracking with remote monitoring via websockets
![[ADAS] 3D Point Cloud Scene Reconstruction](../images/project/pc_recon.png)
[ADAS] 3D Point Cloud Scene Reconstruction
Key Features:
• Unified interface for multi-dataset support (NuScenes, DDAD, KITTI)
• Self-supervised learning without ground truth depth
• Integrated 3D visualization with CamViz
![[ADAS] 2D Panoptic Segmentation](../images/project/pan_seg.gif)
[ADAS] 2D Panoptic Segmentation
Key Features:
• Real-time inference on PC and edge devices
• Multi-threaded architecture with teacher-student distillation
• Prototype web app built with Gradio
![[ADAS] 2D Object Detection](../images/project/2d_od.gif)
[ADAS] 2D Object Detection
Key Features:
• Fast, lightweight model on Jetson edge devices
• Real-time display with minimal latency
• Optimized for web prototyping with Gradio
![[Smart Factory] 2D Multi-Cam Human Intrusion Detection](../images/project/human_intrusion.png)
[Smart Factory] Human Intrusion Detection
Key Features:
• Multi-camera surveillance system for industrial safety
• Real-time instance segmentation with high-speed processing
• Advanced multi-threading and multi-processing pipeline
Academia Research Projects
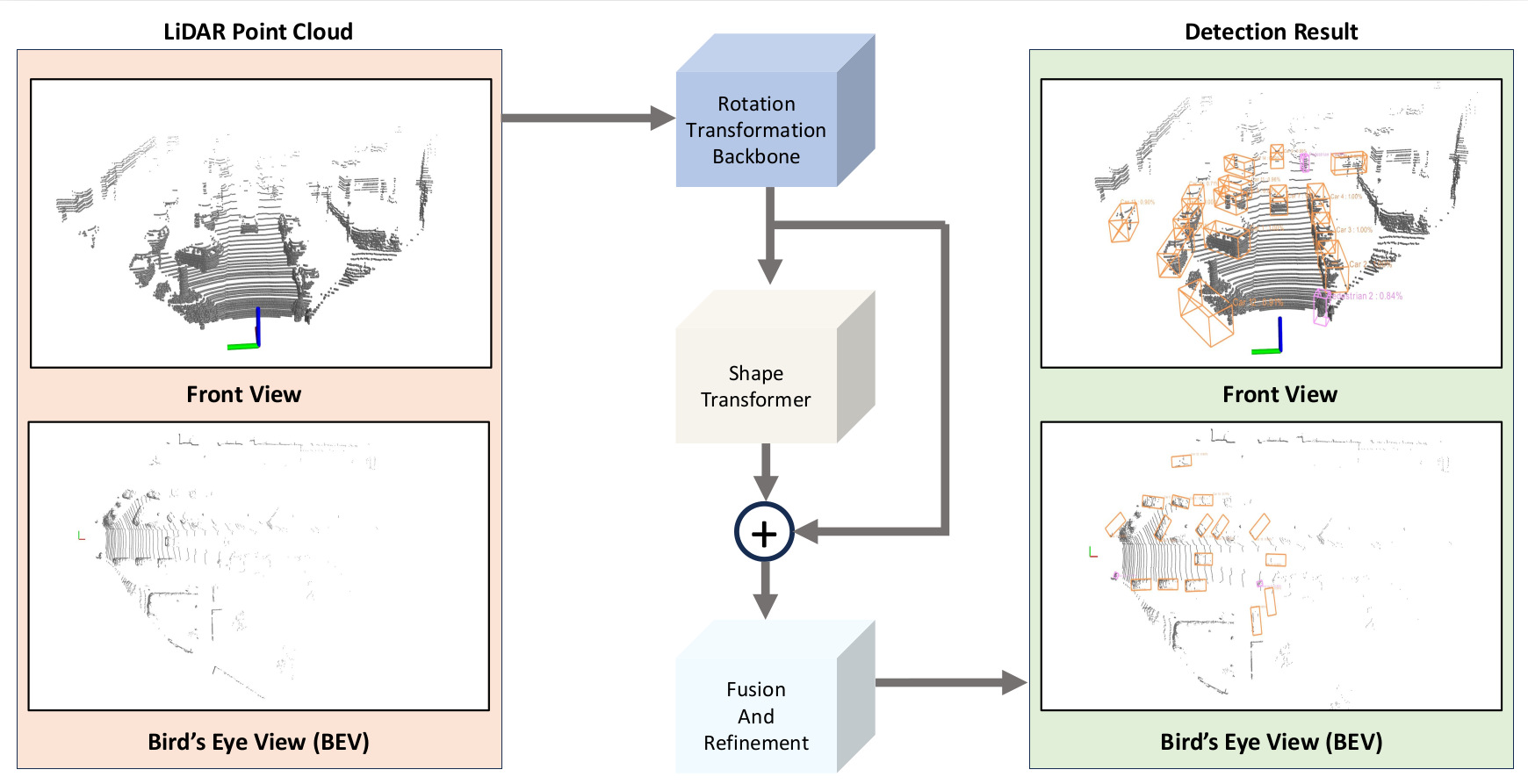
3D Object Detection with Spatial Shape Transformer
A high-performance 3D detector using Transformer architecture, offering a deep understanding of object dimensions and spatial relationships.
[Paper]
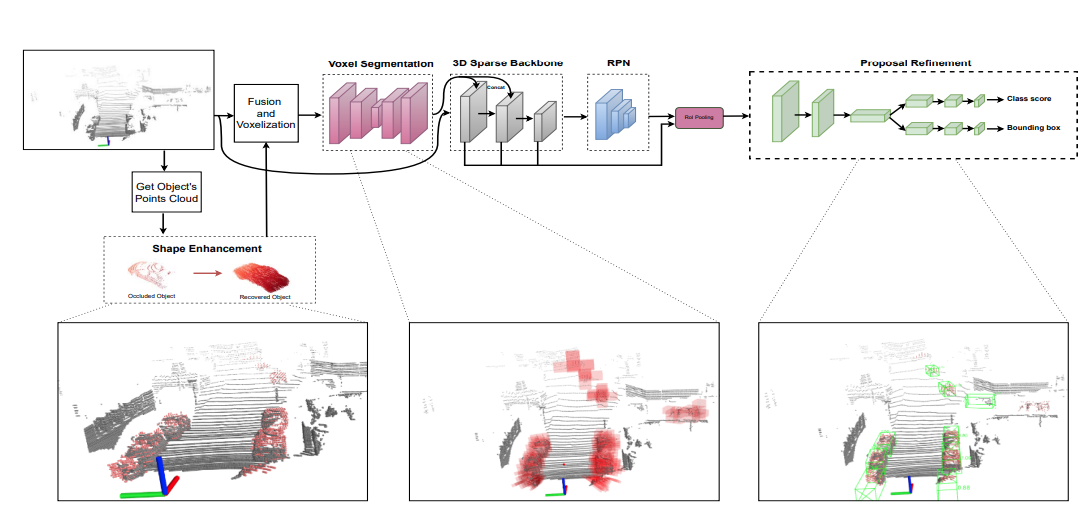
3D Detector for Occluded Object
Utilizing a point-voxel based method, the framework produces high-quality 3D bounding boxes while preserving shape context.
[Paper]
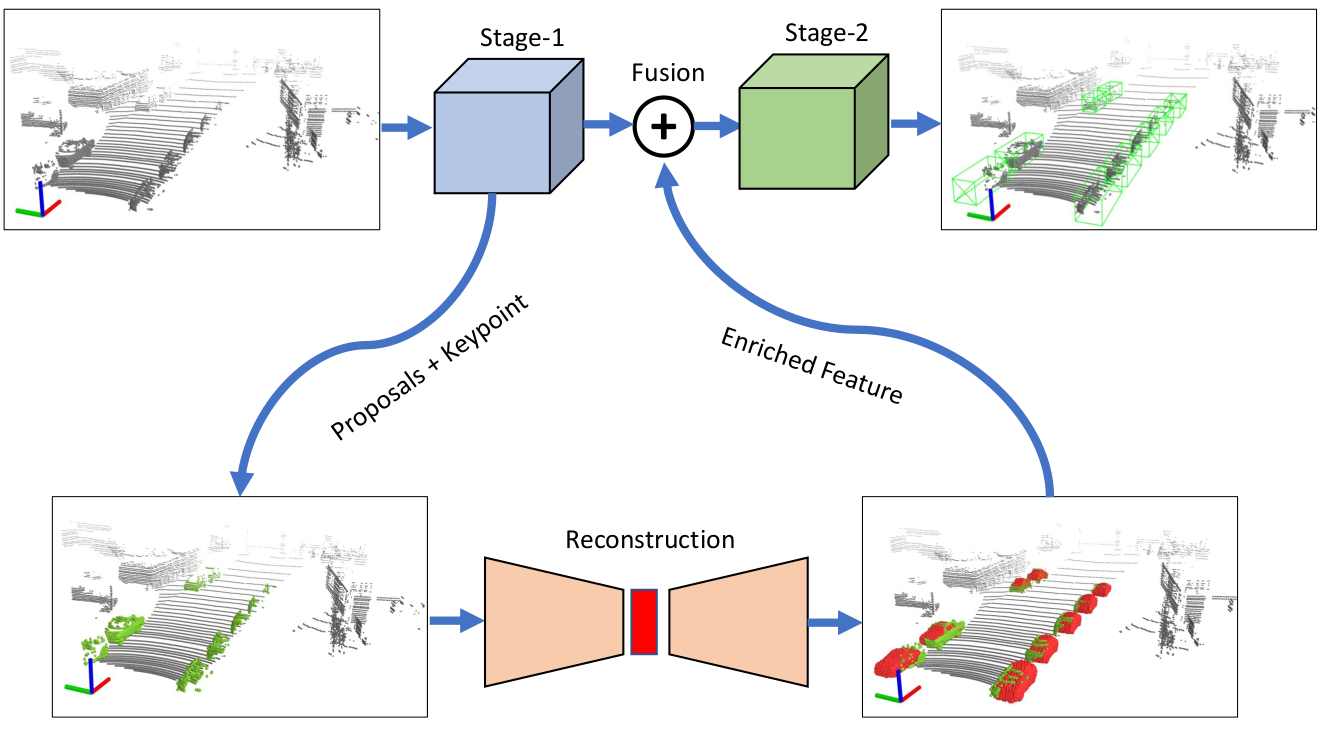
Improving Object Shape of 3D Detector
Enhancing object shape accuracy with innovative techniques and a lightweight quantized model.
[Paper]
Jumping Optimization for Quadruped Robot
Optimizing jump trajectories using spatial methods on both Matlab and ROS platforms for agile robotics.
[Matlab Source] |
[ROS Source]